行业背景
在工程车辆工作过程中,难免会碰到坑洼路段、行人闯入、物体阻挡等场景。传统的车辆大多都是人工操作进行避障和识别,时间长了增加了司机工作强度,另外人为的失误有可能会造成车辆设备的损坏。激光SLAM辅助驾驶工程车辆可在机身顶部安装避障激光雷达和3D避障相机,通过边缘控制器实现行驶过程中的全程路面监控、车速调整和路线规划,在工作过程中实现完美避障。
激光SLAM地面车对车辆的控制系统提出了很多要求:除了保证原有PLC控制功能之外,还提供丰富接口以连接激光雷达实时建图、IMU实时姿态检测等外设,并提供强大的计算能力以支持自动驾驶、多车协同控制应用需求。
解决方案
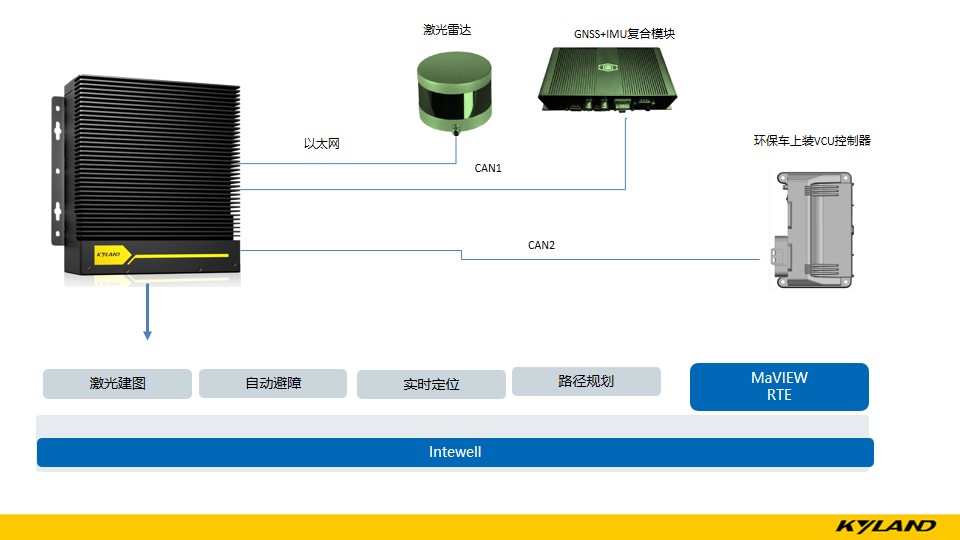
铁算算盘77880工程机械激光SLAM辅助驾驶解决方案,利用铁算算盘77880边缘控制器产品,搭载Intewell工业操作系统,以高实时,虚拟化的操作特性,将视觉系统、算法系统和实时控制系统高度融合,利用一台车载边缘控制器实现工程车辆运动控制、视觉分析、自动驾驶、上云连接;控制器可通过本地CAN接口实现画面展示,拓展人机互动;可灵活接入其他设备如摄像头、雷达、智能传感器等,实现系统灵活升级。

方案亮点
东土边缘通用控制器,高防护等级IP65,集边缘运算、过程控制、运动控制和机器视觉、人工智能等功能于一身;
部署Intewell操作系统,利用操作系统的虚拟化技术虚拟出两个系统,一个实时系统实现姿态数据读取和车辆控制器通讯控制,另一个提供桌面系统用于SLAM实时建图和路径规划;
支持多种总线通信及内置4G/5G模块,支持工程车辆APP远程通信,实现云端一体化管理。
方案效能:
传统车载PLC控制器性能单一,无法将自动驾驶及视觉辅助集成,需要额外的工控机设备来完成相应的自动驾驶及视觉处理任务。铁算算盘77880边缘控制器实现“一机多用”,整体成本运营成本下降60%。
通过虚拟化技术实现在一个硬件系统上支持多个运行环境,部分运行环境支持高实时应用,调度精度在微秒级,整体效率提升20%,整体实时性提高30%
